

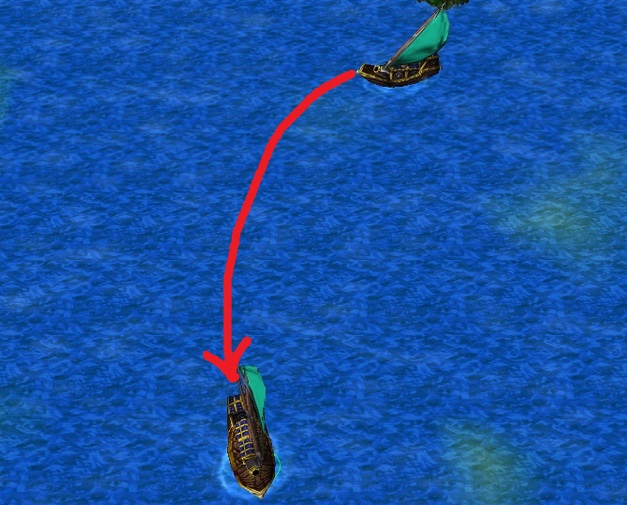
И так, вопрос заключается в том, как сделать так, чтобы юнит разворачивался не как в обычно варкрафте, т.е на месте, а для разворота описывал дугу.Прилагается скриншот с тем, как должен происходить поворот.
Принятый ответ
делать свою систему движения
желательно хорошее владение алгоритмами и стаками, а еще лучше жассом. тогда можем поговорить
`
ОЖИДАНИЕ РЕКЛАМЫ...
Чтобы оставить комментарий, пожалуйста, войдите на сайт.
Ред. Hate
Ред. MpW
Если вы не хотите лишать движения, придется как-то ловить приказы (какие игрок отдает приказы, запоминать). Думаю, что тогда нужно таймером двигать как-то кораблик по дуге, и одновременно изменяя угол поворота. пример проще двигать таймером. есть формула в базе хгм, у NazarPunk видел и др. тут еще надо рассчитать скорость угла поворота (не тек угол дуги, а угол юнита)
Как-то делал систему отлова приказов. Она делала кучу проверок: отдавал ли игрок левый (не нужный) приказ юниту или нет. Если игрок выдергивал юнита, то система выключалась пример это мб пригодиться, если во время искусственного движения таймером выдернет, то таймер прервется. но тебе нужно самому такую же сделать
Еще мб пригодится это ну для проверки попала точка в конус или нет
Ред. MpW
Я не знаю, а как настоящие корабли в таких ситуациях поступали, на мель точно не посадили бы (тут игра, не знаю что автору надо). наверн веслами дали назад
твои варианты какие? ну или летающим сделать
Steal nerves:
Ред. MpW
Ред. MpW
В редакторе объектов есть либо скорость поворота, либо время поворота, ставь туда значение побольше и смотри.